You cannot select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
1.1 KiB
1.1 KiB
Robot à 2 roues (2009)
Introduction
Ce projet a pour but de concevoir un robot à roues complet, capable d'accomplir des tâches simples, de manipuler des objets et disposant de capacités d'interaction humaine. Il comprend la conception de cartes électroniques, la programmation de microprogrammes et d'intelligence artificielle, le logiciel d'interaction ordinateur-robot et la mécanique.
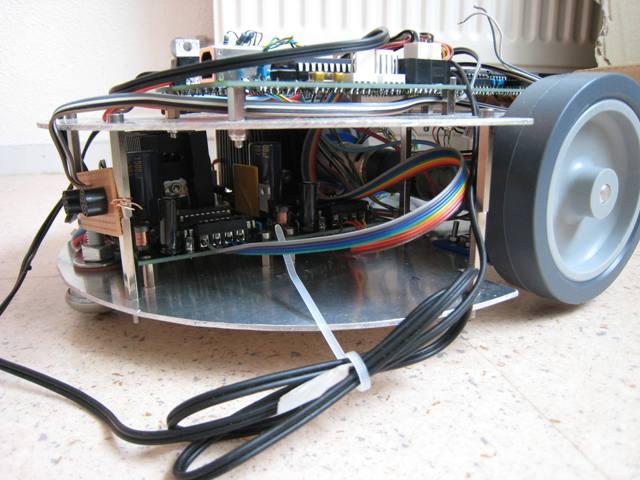
Vue des deux ponts en H du prototype.
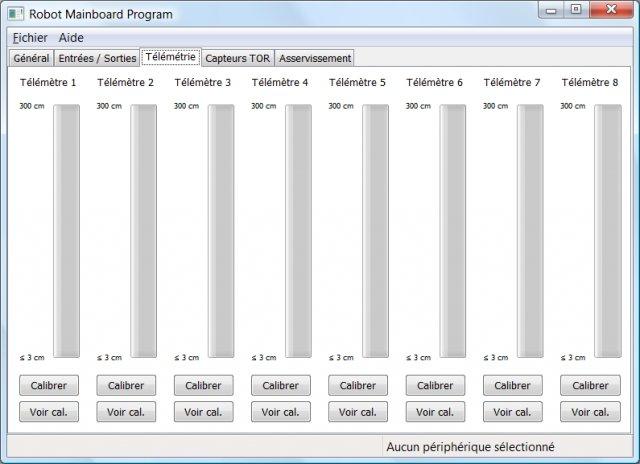
Interface utilisateur pour intéragir avec le robot.

Prototype pour la première implémentation du chassis.
Sources du projet
Le pont en H utilisant un HIP4081